发布时间: 2023-08-03
作者:隆天厦门办公室
在查看机械类专利的技术交底及专利文献的过程中,常常会遇到机械装置复杂,导致难以快速入手和理解其工作原理的问题。尤其是对非机械专业的代理师具有较大的难度,本文就如何快速理解机械类交底和专利文献做一些浅析。
一、通过驱动件入手
机械装置往往由驱动件、若干传动件和执行件组成,驱动件通过若干传动件的传动,最终驱动执行件进行指定的动作。其中,驱动件为机械装置的动力来源,常见的有电机和气(液)压缸等;传动件常见的有齿轮、连杆、丝杆螺母、蜗轮蜗杆等;执行件为最终对工件(目标)进行压合、推拉、抖动等工件。图纸是机械装置最直观的体现,由于在图纸上驱动件具有很好的辨识度,因此理解机械装置时候,可以从驱动件入手,顺着传动关系的顺序一一理清楚各个传动件的运动,这样就可以快速准确的理解各传动件和执行件的运动情况。基于此,我们就可以大体知道机械装置的运动关系网,再结合技术背景及相关原理及有益效果的描述,进一验证所理解的传动及运动关系是否准确,并找出技术交底的核心。下面通过具体的例子,来进行说明:
下述通过公开号为CN109259126A的中国专利“一种海带自动打结装置及其打结方法”进行举例说明,其中下述图1至图4为其部分说明书附图。
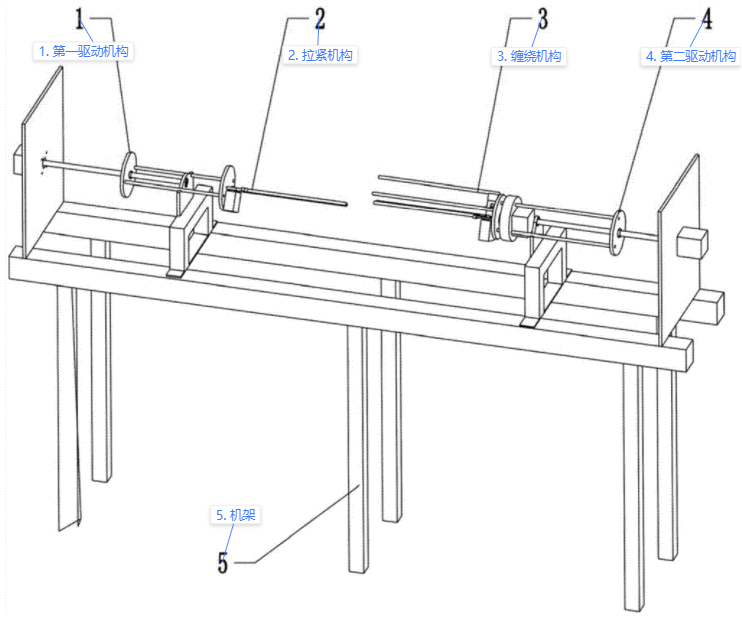
图1
图1是打结装置的整体示意图
由图1我们可以知道打结装置整体由五部分组成,分别是第一驱动机构1、拉紧机构2、缠绕机构3、第二驱动机构4和机架5。
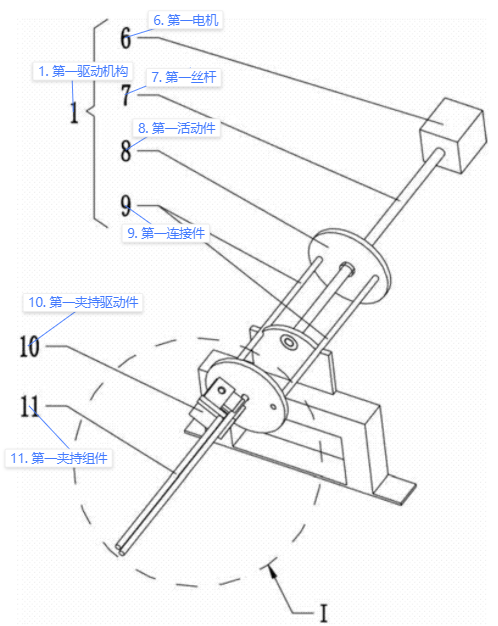
图2
图2是图1中第一驱动机构1和拉紧机构2的详细结构图。
针对上述第一驱动机构1,我们试着通过传动关系入手:
先找出驱动件第一电机6,接着找到传动件第一丝杆7,第一活动件8,第一连接件9,最后再找到执行件第一夹持驱动件10和第一夹持组件11。显然,驱动件第一电机6用来驱动第一活动件8前后活动,且在这个过程第一活动件8还带动执行件第一夹持驱动件10,第一夹持组件11一起前后活动。
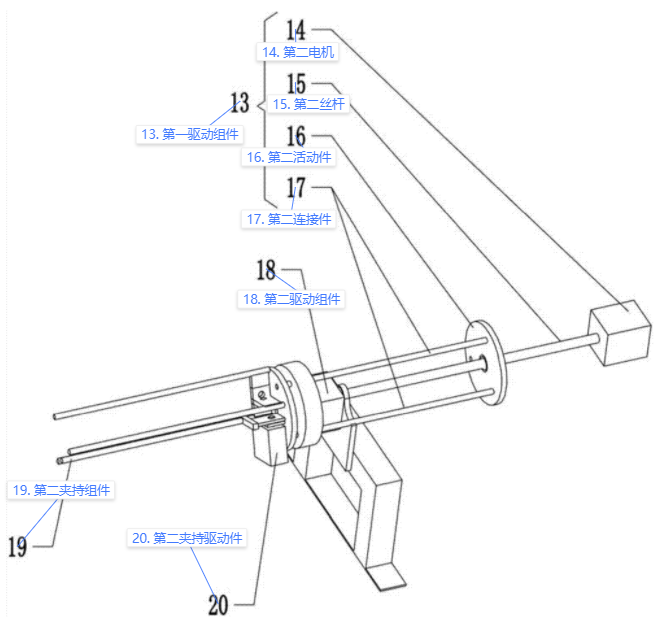
图3
图3是图1中缠绕机构3和第二驱动机构4的详细结构图。其中,缠绕机构3包含第二驱动组件18、第二夹持组件19和第二夹持驱动件20,第二驱动机构4包括第一驱动组件13和第二驱动组件18。
针对上述第二驱动机构4,我们依旧试着通过传动关系入手:
先找出驱动件第二电机14,接着找到传动件第二丝杆15,第二活动件16,和第二连接件17,最后再找到执行件第二夹持组件19和第二夹持驱动件20。显然,驱动件第二电机14用来驱动第二活动件16前后活动,且在这个过程第二活动件16还带动执行件第二夹持组件19和第二夹持驱动件20一起前后活动,此外还带动第二驱动组件18一起前后活动。
另外,对于缠绕机构3,由于其包括第二驱动组件18、第二夹持组件19和第二夹持驱动件20,我们可以大胆预设第二夹持驱动件20是用来驱动第二夹持组件19进行夹持动作的,第二驱动组件18我们暂时无法判断其驱动关系,可以通过对专利文本搜索“第二驱动组件18”我们可以得到“第二驱动组件18是用以驱动缠绕机构3转动”。
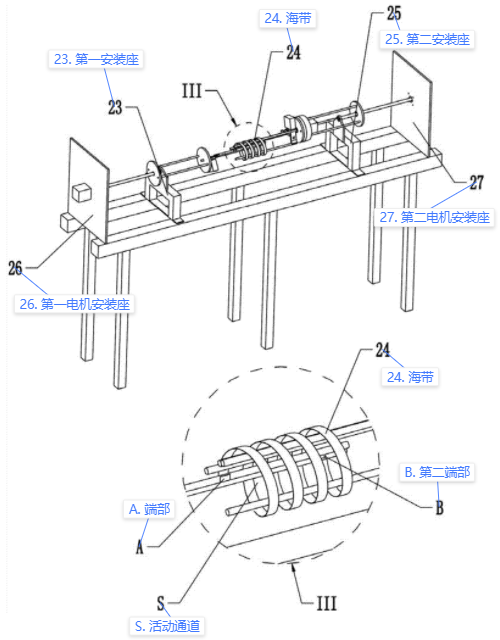
图4
图4是打结装置打结海带过程的示意图。
图中出现新的部件“第一端部A”和“第一端部B”,通过对专利文本搜索第一端部A”和“第一端部B”,可以得到如下相关描述:
“缠绕机构3先夹住海带24的第一端部A,带动海带24螺旋的前进,使海带24螺旋的缠绕在多个缠绕杆21上”,以及“其中该多个缠绕杆21和一对第二夹持件22围成一个活动通道S,拉紧机构2穿过该活动通道S,并夹住海带24的第二端部B,最后拉紧机构2、缠绕机构3分别在第一驱动机构1和第二驱动机构4的作用下,相互远离直至拉紧海带24使海带24完成打结”等相关描述。
至此,基于对图纸的理解以及原文上述说明书的描述,我们就可以准确的得到本技术中打结装置打结海带的原理:首先,缠绕机构3先夹住海带24的一端,带动海带24螺旋的前进,使海带24螺旋的缠绕在多个缠绕杆21上;接着,拉紧机构2再向前活动并海带24的另一端;最后,缠绕机构3和拉紧机构2再相互远离活动,完成海带打结。
上述例子就是通过驱动件入手,顺着传动关系一一理清楚各传动件的动作,最终达到快速理解机械装置工作机制的目的。当然,在这个过程中,如遇到难以判断的传动件,可以试着对专利文本进行具体部件的搜索,往往可以得到更加快速理解机械装置的效果。
二、通过执行件入手
此外,在“通过驱动件入手”去理清机械装置的传动关系时,由于附图显示不清,以及装置复杂程度等原因,可能会出现理解“卡壳”的情况,难以进行下去。这时候我们可以试着从执行件入手,执行件通常是用来执行传动链最终所要实现的动作,我们可以通过技术背景和有效效果等描述,先快速判断出执行件所要执行的具体动作,如摆动、夹具和压合等动作,再按照传动关系逆向进行一一理清楚各个传动件的运动,最懂达到快速理解机械装置工作原理的目的。
三、通过熟悉的部件或机构入手
另外,在“通过驱动件入手”和“通过执行件入手”时,如还不能很好地理解机械装置的工作原理,这时候可以试着从熟悉的部件或机构入手。例如:对于一个机械装置,无论从驱动件出发的正向传动关系,还是从执行件出发的逆向传动关系,均不能很好地理解其工作机制,但我们发现该机械装置所包含的凸轮机构是我们所熟悉的,这时候我们可以试着从该凸轮机构出发,按照该凸轮机构的正向和逆向的传动关系去理解该机械装置的工作原理,有时候可以取得意想不到的收获。
需要强调的是,在实际工作中我们可以灵活综合采用上述“通过驱动件入手”、“通过执行件入手”,以及“通过熟悉的部件或机构入手”等方式进行快速的解读机械类交底和专利文献,以便达到更加高效地理解机械装置的工作原理。当然,每个人怎么快速理解械类交底和专利文献,所采用的具体方式可能各有不同,本文只是从传动关系入手,起到抛砖引玉的作用,如读者有更好的方法,也不用拘泥限定于本文所采取的方法,最终的目的还是实现怎么快速准确地理解机械装置的工作原理。