发布时间: 2023-08-01
作者:刘国萍 专利代理师
一、引言
在机械领域专利文件撰写时,经常会遇到涉及整体设备或复杂装置的技术方案,这类案件较突出特点为:产品的实际结构非常复杂,但客户给的技术交底文件内容比较简单,前期对方案的理解为案件处理的重点和难点。在处理一份专利申请文件过程中,如何既能快速准确理解发明人的技术方案,又能准确和合理扩展技术方案的保护范围,是专利工程师努力的方向和追求的目标。
二、技术方案的理解
1、粗读技术方案
1.1 附图的使用
在机械领域,与繁琐的文字介绍相比,附图具有直观性,因此,在保证附图部分的标号和文字部分名称相统一的情况下,附图可以作为快速阅读技术方案的工具。
1.2 工作过程的锁定
首先,如图1所示,在浏览技术交底时,可先对应附图捋顺整体工作过程,然后,根据不同的工作阶段对应划分成多个不同的模块;其次,确定每个模块执行不同的动作。
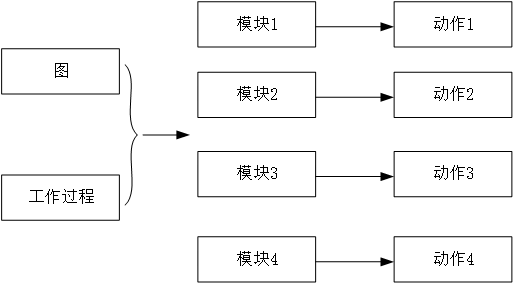
图1
2、精读技术方案
在精细阅读技术方案的过程中,需要将各个模块的功能进行细化,例如,如图2所示,上料机构执行上料动作,输送机构执行输送动作,检测机构执行检测动作,下料机构执行下料动作。最后,理解每个模块中各个部件相互配合的原理和过程。
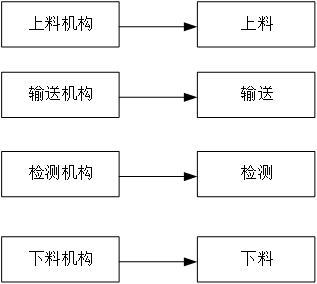
图2
需要特别说明的是,由于待加工工件的形状存在差异,待加工工件可分为带状工件、板状工件和块状工件等类型。针对不同的待加工工件类型,具有不同的上下料运输方式和检测方式,代理师可在平时作业中及时总结相应规律,有利于快速、理解和拓展技术方案。
三、技术方案总结
1、关于板状工件的技术方案
1.1、板状工件具体可为电路板、电芯或显示面板等平板状结构的工件,板状工件的表面相对比较平整和光滑,且板状工件的长度和宽度大于高度,即板状工件的厚度比较薄。
1.2、板状工件上料、下料的方式
1.21、板状工件可利用传动带进行输送,则传动带的长度方向即为板状工件的传送方向,传动带的布置方向可沿水平方向或者竖直方向进行布置。
1.22、板状工件可利用承载台承载和支撑并利用顶升气缸进行输送,承载台用于承载板状工件,顶升气缸驱动承载台并带动板状工件升降运动,从而实现板状工件的升降和运输。
1.3、板状工件的固定方式
由于板状工件的表面比较光滑,可采用真空吸附的方式进行固定。载台具有吸附孔,真空发生器连通于吸附孔,真空发生器抽取真空,使吸附孔内产生负压,真空发生器通过吸附孔将板状工件吸附于载台上,用于板状工件的固定。
1.4、板状工件的输送方式
板状工件可采用机械手进行运输,机械手包括但不限于三个输送组件,利用三个输送组件可驱动板状工件分别对应沿X向、Y向和Z向三个方向运动,实现板状工件在三维空间方向上的输送。
当然,Y向移动组件、X向移动组件和Z向移动组件三者之间的位置可以按照如图3所示的几种方式进行拓展,例如:X向、Y向和Z向的互换或者增加旋转、倾斜等自由度,只需要对应调整在不同方向的驱动源设置于不同方向的平台上。其中,三个输送组件对应的输送方向的顺序适应性颠倒或者调换,不会影响实质输送过程。

图3
1.5、板状工件的检测方式
根据板状工件不同的质量缺陷,利用不同的检测元件并采用对应检测方式,以对板状工件进行质量检测。如图4所示,可利用CCD相机对板状工件的表面缺陷进行检测;可利用探针对板状工件的性能缺陷进行检测;在保证板状工件的内腔密封之后,可通过对板状工件的内腔抽取真空,以进行密封缺陷检测。
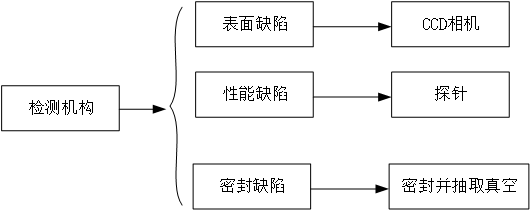
图4
当然,一般板状工件的输送、检测方式需要与固定方式相结合,以保证板状工件在输送、检测过程中的位置稳定性和准确性。
2、关于块状工件的技术方案
2.1 块状工件的外形结构相对比较规整,在汽车的发动机、底盘、制动系统等关键部件都包含块状零件或块状工件。块状工件的输送方式和板状工件类似,故不再详细描述。
2.2 块状工件固定
块状工件的固定可采用夹持固定的方式,夹持气缸的输出端连接于两个卡爪,夹持气缸能够驱动两个卡爪向彼此靠近移动,使两个卡爪夹取待加工工件;夹持气缸能够驱动两个卡爪向彼此远离的方向移动,使两个卡爪松开待加工工件。
3、关于带状工件的技术方案
3.1 带状工件具体可指胶带、布匹、卷纸等长度较长的工件,在生产加工完成后需要卷绕在卷芯上,便于后续运输或者储存的收纳。带状工件的检测方式和板状工件类似,故不再详细描述。
3.2 带状工件的输送
带状工件的输送可利用放料辊和收料辊的正反转进行收料和放料,则辊的布置方向即为带状工件的传送方向。
3.3 带状工件的固定
带状工件可利用同样为带状结构的工具进行固定,例如,胶带的粘接面粘附带状工件,带状工件利用带状结构的胶带进行固定,胶带可随带状工件同步运动。
四、撰写描述
本部分以板状工件为例,板状工件经历上下料、固定、输送和检测等过程,对这些过程的撰写和描述进行简要说明。
1、上下料过程
如图5所示,在驱动轮25和从动轮(右侧矩形框位置)之间张紧绕设有传动带23,传动带23上用于承载待加工的电芯。随着驱动轮25的转动并在驱动轮25的带动下,待加工的电芯可以通过传动带23进行输送。上料驱动源21的输出端连接于主动轮24,在主动轮24和驱动轮25之间绕设有皮带26,上料驱动源21驱动主动轮24的转动,并带动皮带26的移动和驱动轮25的转动。在皮带26的一侧还设置有张紧轮27,张紧轮27起到了张紧的作用,保证了传动连接的可靠性。

图5
2、固定过程
如图6和图7所示,真空发生器连通于吸附孔12,真空发生器通过吸附孔12将待检测工件吸附于载台11上,真空发生器抽取真空,使吸附孔12内产生负压,以将待检测工件固定在载台11上。

图6
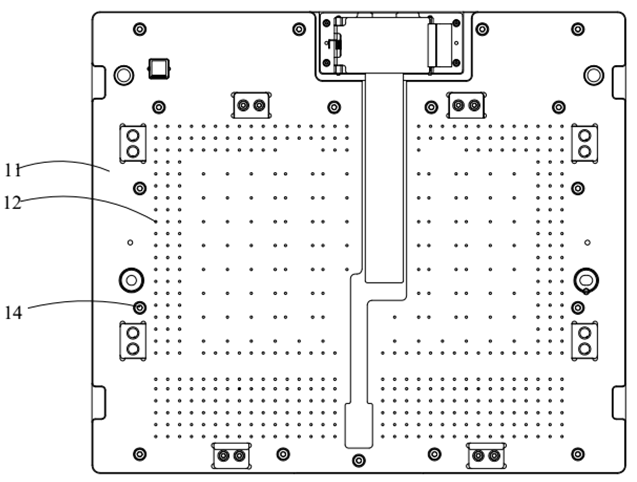
图7
3、固定和输送过程
如图8-图9所示,输送机构包括X向移动组件、Y向移动组件、Z向移动组件和抓取组件,抓取组件用于抓取待加工工件,X向移动组件、Y向移动组件、Z向移动组件分别带动抓取组件沿X向、Y向和Z向运动。
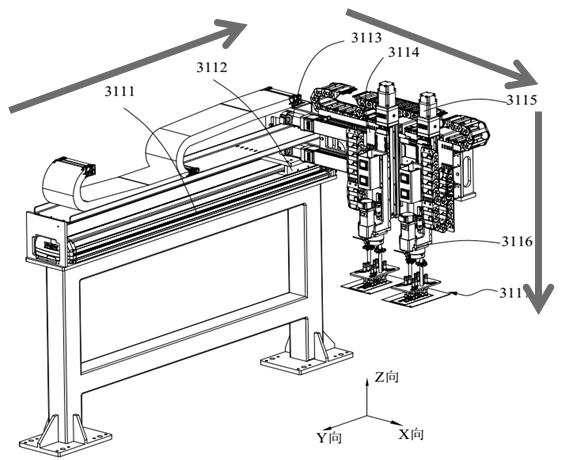
图8
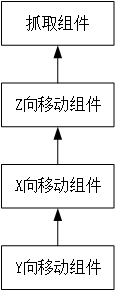
图9
具体地,对于X向移动组件可以表述为:入料X向驱动源3113设置于入料Y向平台3112上,入料X向驱动源3113具体为入料X向电机,入料X向驱动源3113的输出端连接于入料X向平台3114,入料X向驱动源3113能够驱动入料X向平台3114沿X向移动。对于X向移动组件、Z向移动组件类似股部详细赘述。
如图10所示的方框部分,入料吸盘均设置于入料Z向平台3116上,入料真空发生器分别连通于入料吸盘,入料吸盘用于吸附工件,从而实现对工件吸附抓取的过程。
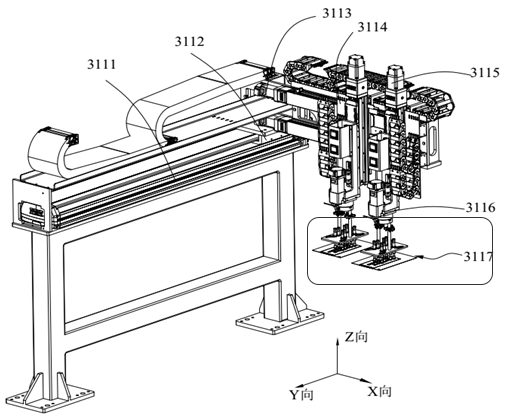
图10
4、检测过程
如图11所示,图像检测组件621包括光源6211和相机6212,相机6212用于对待加工工件的表面进行拍照处理,光源6211用于为待加工工件的表面进行补光处理。同时,为了保证拍照的准确性,相机6212通常会与微调平台搭配使用,微调平台用于调节相机6212的位置。具体地,微调平台包括竖直粗调节部件622、竖直精调节部件625和倾斜调节台624,利用竖直粗调节部件622对图像检测组件621沿竖直方向进行初步粗调节,利用竖直精调节部件625对图像检测组件621沿竖直方向进行精细调节,倾斜调节台624设置于竖直粗调节部件622和竖直精调节部件625之间,对图像检测组件621进行倾斜调节。当然,微调平台包括但不限于竖直粗调节部件622、竖直精调节部件625和倾斜调节台624,可以选择其中至少一种或者其他辅助调节结构。
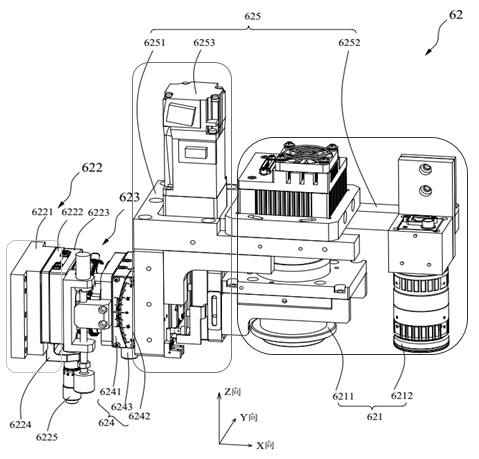
图11
五、亮点提示
1.本文仅以整体设备或较复杂装置的技术方案为例,对这类案件技术方案的前期了解和后期撰写进行简要说明。
在技术方案理解阶段,如图12所示,整体到细节→整体把握→模块分解,通过由大及小的策略,从整体方案的工作过程到局部细节结构实现,采用逐步细化拓展的方式,对技术方案进行分层次把控。

图12
在申请文件撰写阶段,如图13所示,模块分解→整体把握→细节到整体,根据小主题模块的具体细节结构逐步拓展出大主题方案,以扩大申请人的保护范围,从而在相关领域保证申请人利益的最大化。

图13
2.在技术方案仔细研读过程中,除了逐字逐句阅读之外,还可以利用以下技巧快速了解整个技术方案:
技巧1:如果技术方案对应有三维模型,那么可根据三维模型的左侧工作栏,可直接进行模块分割或者获取零件名称;
技巧2:根据初步外部形状判断,以确定驱动件的类型,例如:
如果外部形状类似于圆柱形,则驱动件可能为电机,那么在驱动件的输出端具有驱动轴或者丝杠等;
如果外部形状类似于长方体形,则驱动件可能为气缸,那么在驱动件的输出端具有气缸杆或卡爪等;
技巧3:根据导向机构的导向方向,确定运动方向,例如:
如果导轨和滑块滑动配合,那么导轨的长度或延伸方向即为运动方向;
如果导杆和导向套筒配合,当驱动件的行程比较大时,导杆在驱动件的驱动杆的四周,以实现导杆对驱动件辅助导向功能,则导杆的长度或延伸方向即为运动方向。
3.在机械领域中,不同类别的案件具有一定的规律,在长期撰写过程中需要随时进行积累,并总结出这类案件快速了解技术方案的方法和技巧,不仅可以有效节省沟通和撰写时间,并且可以帮助客户有效拓展技术方案。